Machine Learning on Cloud Container Instances
This section describes how to perform machine learning on Cloud Container Instances.
Prerequisites
- You have obtained your Alaya NeW company account and password. If you need assistance or have not registered yet, you can complete the registration by following the instructions in User Registration.
- Your company account has sufficient balance to use the Cloud Container Instance service. For the latest promotional details and pricing information, please Contact US.
Procedure
Step 1: Create a Cloud Container Instance
-
Sign in to the Alaya NeW platform using your company account. Choose "Product" > "Computing" > "Cloud Container Instance" to enter the CCI page.
-
Choose [Create Cloud Container Instance] to open the instance creation page. Configure the instance name, description, AIDC, and other parameters.
In this example, configure the parameters as follows:
-
Resource Type: Select "Cloud Container Instance – GPU H800A (1 GPU)". -
For other parameters, refer to the table below.
Configuration Item Description Requirements Required Instance Name A unique identifier used to distinguish this Cloud Container Instance. Must start with a letter; supports letters, digits, hyphens (-), and underscores (_); length 4–20 characters. Yes Instance Description A brief text description of the container’s purpose, usage, or configuration. None No AIDC The data center used to support cloud container instance service. Select an available data center (for example, Beijing Region 3 or Beijing Region 5). Yes Payment Method The method for using data center resources. Select the supported payment method. Currently, Pay-As-You-Go is used. Yes Resource Configuration Detailed compute resource specifications, including resource type, GPU, compute resource, and disk configuration. Select resources that meet your requirements. Yes Storage Configuration Optional NAS storage that can be mounted to the Cloud Container Instance Choose whether to mount NAS storage. No Image You can choose from public images (including base images and application images) or private images, depending on your needs. - Yes Other Settings Supports configuring environment variables (key–value pairs), and enabling auto-shutdown and auto-release for the Cloud Container Instance. - No
-
-
After configuring the instance parameters, choose "Create Now". In the confirmation dialog box, review the configured parameters and choose "Confirm" to complete the creation of the Cloud Container Instance.
You can view the created instances on the [Computing / Cloud Container Instance] page. When the instance status is "Running", the instance has been created successfully and is ready for use.
Step 2: Perform Machine Learning Tasks
-
Enter Jupyter.
On the "Cloud Container Instance" page, open the "Container List" tab and locate the target instance. Choose the Jupyter icon on the right to open the Jupyter environment.

-
Execute the following to build a machine learning training workflow.
Code details
import math
import time
import random
import numpy as np
import matplotlib.pyplot as plt
import torch
import torch.nn as nn
from torch.utils.data import TensorDataset, DataLoader
from pathlib import Path
# Set random seeds to ensure reproducibility
def set_seed(seed=42):
random.seed(seed)
np.random.seed(seed)
torch.manual_seed(seed)
if torch.cuda.is_available():
torch.cuda.manual_seed_all(seed)
torch.backends.cudnn.deterministic = True
set_seed(42)
def make_moons(n_samples=1000, noise=0.2):
"""Implement make_moons manually without relying on sklearn"""
n_samples_out = n_samples // 2
n_samples_in = n_samples - n_samples_out
outer_circ_x = np.cos(np.linspace(0, math.pi, n_samples_out))
outer_circ_y = np.sin(np.linspace(0, math.pi, n_samples_out))
inner_circ_x = 1 - np.cos(np.linspace(0, math.pi, n_samples_in))
inner_circ_y = 1 - np.sin(np.linspace(0, math.pi, n_samples_in)) - .5
X = np.vstack([np.append(outer_circ_x, inner_circ_x),
np.append(outer_circ_y, inner_circ_y)]).T.astype(np.float32)
y = np.hstack([np.zeros(n_samples_out, dtype=np.float32),
np.ones(n_samples_in, dtype=np.float32)])
if noise > 0:
X += np.random.normal(0, noise, X.shape)
return X, y
# Create dataset
X, y = make_moons(1200, noise=0.25)
# Split into training and validation sets
perm = np.random.permutation(len(X))
train_size = int(0.8 * len(X))
X_train, y_train = X[perm[:train_size]], y[perm[:train_size]]
X_val, y_val = X[perm[train_size:]], y[perm[train_size:]]
# Create data loaders
train_ds = TensorDataset(torch.from_numpy(X_train), torch.from_numpy(y_train))
val_ds = TensorDataset(torch.from_numpy(X_val), torch.from_numpy(y_val))
train_loader = DataLoader(train_ds, batch_size=64, shuffle=True)
val_loader = DataLoader(val_ds, batch_size=256, shuffle=False)
class MLP(nn.Module):
def __init__(self, in_dim=2, hidden=128, dropout_rate=0.2):
super().__init__()
self.net = nn.Sequential(
nn.Linear(in_dim, hidden),
nn.ReLU(),
nn.Dropout(dropout_rate),
nn.Linear(hidden, hidden//2),
nn.ReLU(),
nn.Dropout(dropout_rate),
nn.Linear(hidden//2, 1)
)
def forward(self, x):
return self.net(x).squeeze(1)
# Set device
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
print(f"Using device: {device}")
# Initialize model, loss, and optimizer
model = MLP(hidden=128, dropout_rate=0.2).to(device)
criterion = nn.BCEWithLogitsLoss()
optimizer = torch.optim.Adam(model.parameters(), lr=1e-2, weight_decay=1e-4)
scheduler = torch.optim.lr_scheduler.ReduceLROnPlateau(
optimizer, mode='min', factor=0.5, patience=10
)
# Training parameters
EPOCHS = 200
PLOT_FREQ = 5 # Plot the graph every 5 epochs
best_val_loss = float('inf')
patience_counter = 0
patience = 20 # early stopping patience
# Create directory for saving models
Path("checkpoints").mkdir(exist_ok=True)
# Enable interactive plotting
plt.ion()
fig = plt.figure(figsize=(15, 6))
ax_loss = fig.add_subplot(1, 2, 1)
ax_boundary = fig.add_subplot(1, 2, 2)
train_losses, val_losses = [], []
train_accs, val_accs = [], []
def calculate_accuracy(model, data_loader):
"""Calculate model accuracy on the given DataLoader"""
model.eval()
correct = 0
total = 0
with torch.no_grad():
for xb, yb in data_loader:
xb, yb = xb.to(device), yb.to(device)
outputs = torch.sigmoid(model(xb))
predicted = (outputs > 0.5).float()
total += yb.size(0)
correct += (predicted == yb).sum().item()
return correct / total
def plot_boundary(ax, epoch):
"""Plot decision boundary"""
ax.clear()
# Create grid
h = 0.02
x_min, x_max = X[:, 0].min() - .5, X[:, 0].max() + .5
y_min, y_max = X[:, 1].min() - .5, X[:, 1].max() + .5
xx, yy = np.meshgrid(np.arange(x_min, x_max, h),
np.arange(y_min, y_max, h))
# Predict grid points
grid = torch.from_numpy(np.c_[xx.ravel(), yy.ravel()]).float().to(device)
with torch.no_grad():
Z = torch.sigmoid(model(grid)).cpu().numpy().reshape(xx.shape)
# Draw decision boundary
contour = ax.contourf(xx, yy, Z, levels=50, cmap='RdBu', alpha=0.7)
# Plot data points
ax.scatter(X_train[:, 0], X_train[:, 1], c=y_train, cmap='bwr',
edgecolors='k', marker='o', label='Train', alpha=0.7)
ax.scatter(X_val[:, 0], X_val[:, 1], c=y_val, cmap='bwr',
edgecolors='k', marker='x', label='Val', alpha=0.7)
ax.set_xlim(xx.min(), xx.max())
ax.set_ylim(yy.min(), yy.max())
ax.set_title(f'Decision Boundary (Epoch {epoch})')
ax.legend()
plt.colorbar(contour, ax=ax)
def plot_metrics(ax):
"""Plot loss and accuracy curves"""
ax.clear()
# Plot losses
ax.plot(train_losses, label='Train Loss', color='blue', linestyle='-')
ax.plot(val_losses, label='Val Loss', color='red', linestyle='-')
ax.set_xlabel('Epoch')
ax.set_ylabel('Loss', color='black')
ax.tick_params(axis='y', labelcolor='black')
ax.legend(loc='upper left')
# Create second y-axis for accuracy
ax2 = ax.twinx()
ax2.plot(train_accs, label='Train Acc', color='blue', linestyle='--')
ax2.plot(val_accs, label='Val Acc', color='red', linestyle='--')
ax2.set_ylabel('Accuracy', color='black')
ax2.tick_params(axis='y', labelcolor='black')
ax2.legend(loc='upper right')
ax.set_title('Training Metrics')
ax.grid(True)
# Training loop
start_time = time.time()
for epoch in range(1, EPOCHS + 1):
# Training phase
model.train()
epoch_loss = 0.
for xb, yb in train_loader:
xb, yb = xb.to(device), yb.to(device)
optimizer.zero_grad()
logits = model(xb)
loss = criterion(logits, yb)
loss.backward()
optimizer.step()
epoch_loss += loss.item() * xb.size(0)
train_loss = epoch_loss / len(train_loader.dataset)
train_losses.append(train_loss)
# Validation phase
model.eval()
epoch_loss = 0.
with torch.no_grad():
for xb, yb in val_loader:
xb, yb = xb.to(device), yb.to(device)
logits = model(xb)
loss = criterion(logits, yb)
epoch_loss += loss.item() * xb.size(0)
val_loss = epoch_loss / len(val_loader.dataset)
val_losses.append(val_loss)
# Calculate accuracy
train_acc = calculate_accuracy(model, train_loader)
val_acc = calculate_accuracy(model, val_loader)
train_accs.append(train_acc)
val_accs.append(val_acc)
# Scheduler step
scheduler.step(val_loss)
# Print progress
if epoch % 10 == 0 or epoch == 1:
print(f'Epoch {epoch:03d}/{EPOCHS} | '
f'Train Loss: {train_loss:.4f} | Val Loss: {val_loss:.4f} | '
f'Train Acc: {train_acc:.3f} | Val Acc: {val_acc:.3f} | '
f'LR: {optimizer.param_groups[0]["lr"]:.2e}')
# Save best model
if val_loss < best_val_loss:
best_val_loss = val_loss
patience_counter = 0
torch.save({
'epoch': epoch,
'model_state_dict': model.state_dict(),
'optimizer_state_dict': optimizer.state_dict(),
'loss': val_loss,
}, 'checkpoints/best_model.pth')
else:
patience_counter += 1
# Early stopping check
if patience_counter >= patience:
print(f"Early stopping at epoch {epoch}")
break
# Visualization
if epoch % PLOT_FREQ == 0 or epoch == 1 or epoch == EPOCHS:
plot_metrics(ax_loss)
plot_boundary(ax_boundary, epoch)
fig.tight_layout()
plt.pause(0.01)
# Training finished
end_time = time.time()
print(f"Training completed in {end_time - start_time:.2f} seconds")
# Turn off interactive mode
plt.ioff()
# Load best model
checkpoint = torch.load('checkpoints/best_model.pth')
model.load_state_dict(checkpoint['model_state_dict'])
print(f"Loaded best model from epoch {checkpoint['epoch']} with val loss {checkpoint['loss']:.4f}")
# Final evaluation
model.eval()
with torch.no_grad():
# Evaluate on full dataset
X_tensor = torch.from_numpy(X).to(device)
y_pred_proba = torch.sigmoid(model(X_tensor)).cpu().numpy()
y_pred = (y_pred_proba > 0.5).astype(int)
# Compute accuracy
accuracy = (y_pred == y).mean()
print(f'Final accuracy on full data: {accuracy:.3f}')
# Show final plots
plt.figure(figsize=(15, 6))
# Loss and accuracy curves
plt.subplot(1, 2, 1)
plt.plot(train_losses, label='Train Loss', color='blue', linestyle='-')
plt.plot(val_losses, label='Val Loss', color='red', linestyle='-')
plt.xlabel('Epoch')
plt.ylabel('Loss', color='black')
plt.tick_params(axis='y', labelcolor='black')
plt.legend(loc='upper left')
plt.twinx()
plt.plot(train_accs, label='Train Acc', color='blue', linestyle='--')
plt.plot(val_accs, label='Val Acc', color='red', linestyle='--')
plt.ylabel('Accuracy', color='black')
plt.tick_params(axis='y', labelcolor='black')
plt.legend(loc='upper right')
plt.title('Training Metrics')
plt.grid(True)
# Decision boundary
plt.subplot(1, 2, 2)
h = 0.02
x_min, x_max = X[:, 0].min() - .5, X[:, 0].max() + .5
y_min, y_max = X[:, 1].min() - .5, X[:, 1].max() + .5
xx, yy = np.meshgrid(np.arange(x_min, x_max, h),
np.arange(y_min, y_max, h))
grid = torch.from_numpy(np.c_[xx.ravel(), yy.ravel()]).float().to(device)
with torch.no_grad():
Z = torch.sigmoid(model(grid)).cpu().numpy().reshape(xx.shape)
plt.contourf(xx, yy, Z, levels=50, cmap='RdBu', alpha=0.7)
plt.scatter(X_train[:, 0], X_train[:, 1], c=y_train, cmap='bwr',
edgecolors='k', marker='o', label='Train', alpha=0.7)
plt.scatter(X_val[:, 0], X_val[:, 1], c=y_val, cmap='bwr',
edgecolors='k', marker='x', label='Val', alpha=0.7)
plt.colorbar()
plt.xlim(xx.min(), xx.max())
plt.ylim(yy.min(), yy.max())
plt.title('Final Decision Boundary')
plt.legend()
plt.tight_layout()
plt.show() -
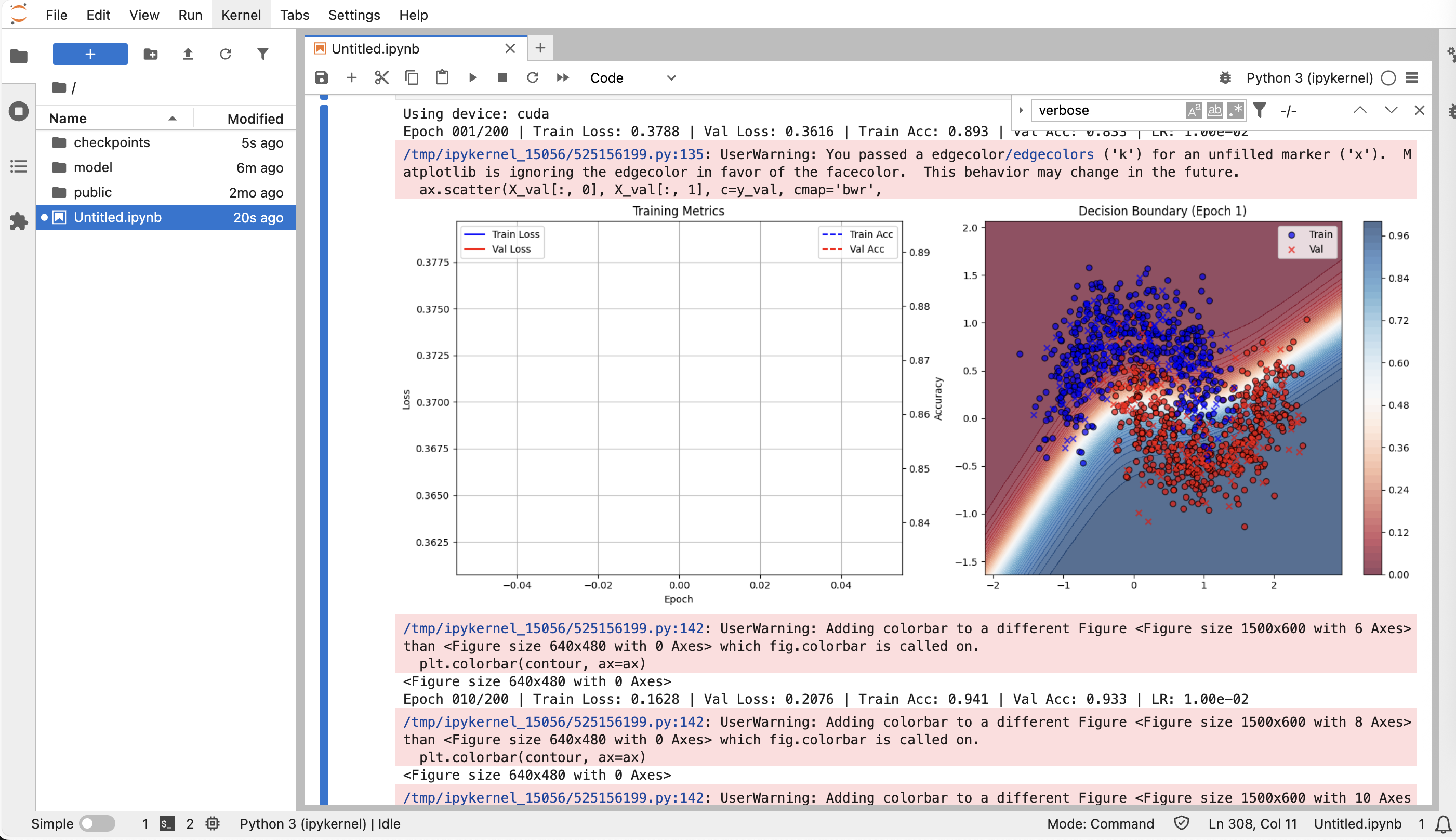
The following figure shows the output of the machine learning workflow.